camera-pose-estimation
Given a map data (image + lidar), estimate the 6 DoF camera pose of the query image.
Camera Pose Estimation
Given a map contians street-view images and 3D data (e.g. lidar, SfM point cloud, or depth), estimate the 6 DoF camera pose of a query image.
-
Input of the system: query image, reference image and lidar point cloud, where reference image and lidar are known in a global coordinate system.
-
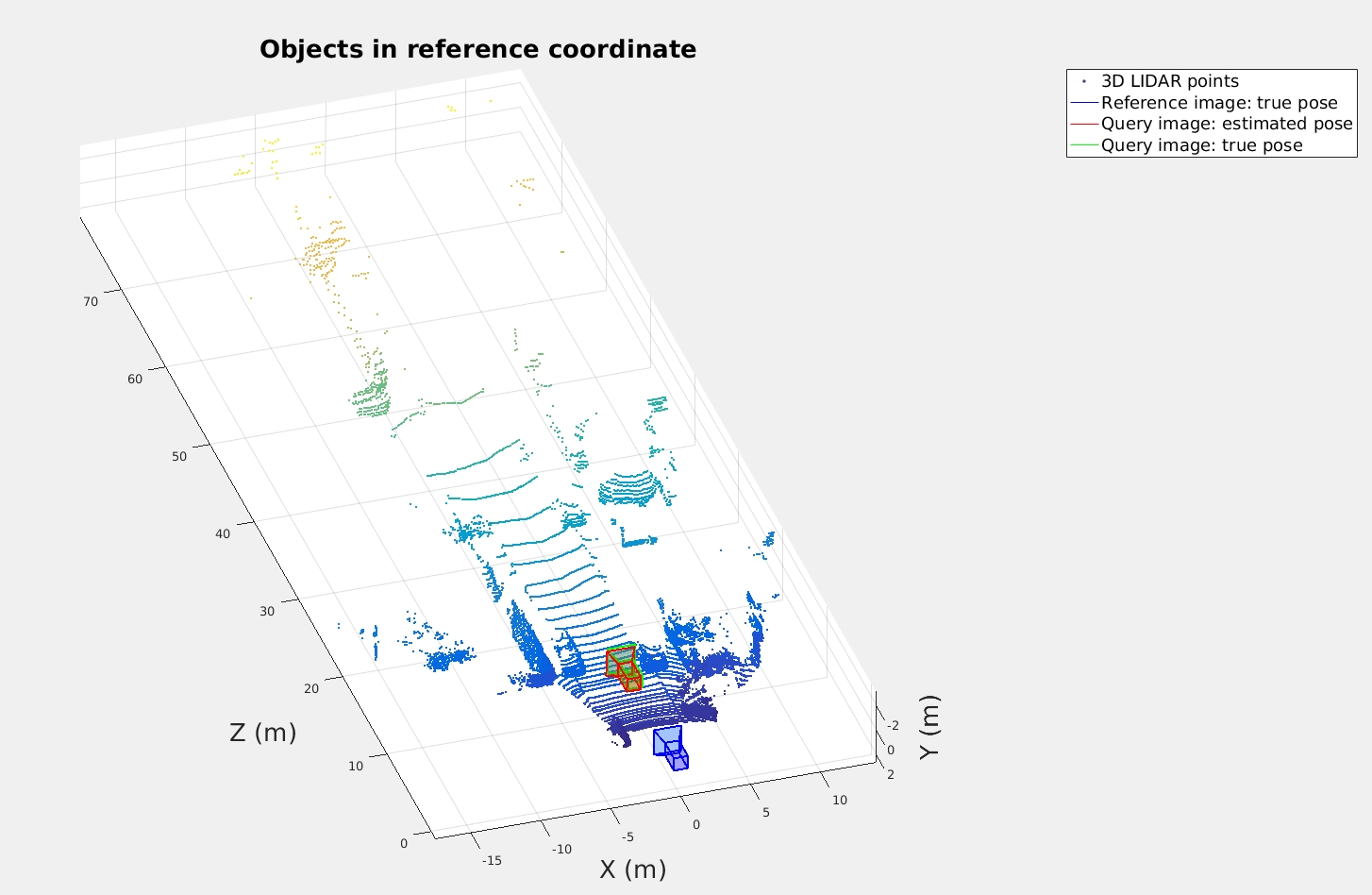
Output of the system: 6 DoF camera pose of the query image in the global coordinate system.
Note: 6 DoF camera pose mean 3 DoF translation and 3 DoF rotation along x, y, z axis.
One example of query and reference images

System outputs
Code & Files
1. Dependencies & environment
- Matlab 2016b
- OS: Ubuntu 16.04 (should work on other platform too)
2. My project files
(Note: the hyperlinks only works if you are on the homepage of this GitHub reop, and if you are viewing it in “github.io” you can be redirected by clicking the View the Project on GitHub on the top)
-
main.m is the main code for this demo.
-
read_pose.m read camera pose.
-
read_lidar_binary.m read lidar bianry file.
-
ref.m is the class of reference image.
-
world2Image.m is the function of project points from world to image.
-
test folder contains the test data.
-
source folder contains the example images.
3. How to run the code
(1) Install Matlab (tested with 2016b and 2017a).
(2) Set your current path to this demo and run main.m.
Release History
- 0.1.1
- Update visualization code and font size
- Date 24 April 2017
- 0.1.0
- The first proper release
- Date 22 April 2017