tracking-with-Unscented-Kalman-Filter
Object (e.g Pedestrian, biker, vehicles) tracking by Unscented Kalman Filter (UKF), with fused data from both lidar and radar sensors.
View the Project on GitHub JunshengFu/tracking-with-Unscented-Kalman-Filter
Object Tracking with Unscented Kalman Filter
Objective
Utilize sensor data from both LIDAR and RADAR measurements for object (e.g. pedestrian, vehicles, or other moving objects) tracking with the Unscented Kalman Filter.
Unscented Kalman Filter example
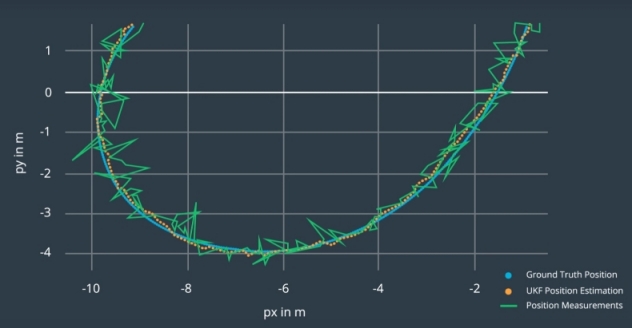
Kalman Filters variances
All Kalman filters have the same mains steps: 1. Initialization, 2. Prediction, 3. Update. A Standard Kalman Filter (KF) can only handle linear equations. Both the Extended Kalman Filter (EKF) and the Unscented Kalman Filter allow you to use non-linear equations; the difference between EKF and UKF is how they handle non-linear equations: Extended Kalman Filter uses the Jacobian matrix to linearize non-linear functions; Unscented Kalman Filter, on the other hand, does not need to linearize non-linear functions, insteadly, the unscented Kalman filter takes representative points from a Gaussian distribution.
Unscented Kalman Filter VS Extended Kalman Filter
Table 1: Accuracy comparison in RMSE by using EKF and UKF with both lidar and radar measurements. The lidar and radar measurements are included in the txt file under the data folder.
| state | UKF | EKF |
|---|---|---|
| px | 0.0640299 | 0.0972256 |
| py | 0.0832734 | 0.0853761 |
| vx | 0.330315 | 0.450855 |
| vy | 0.212456 | 0.450855 |
Table 2: Accuracy comparison in RMSE by UKF with different sensor measurements.
| state | lidar and radar | only lidar | only radar |
|---|---|---|---|
| px | 0.0640299 | 0.168267 | 0.203744 |
| py | 0.0832734 | 0.146901 | 0.250427 |
| vx | 0.330315 | 0.613026 | 0.450143 |
| vy | 0.212456 | 0.252216 | 0.249284 |
Conclusions from aboves:
- From Table 1, we can see the UKF outperform EKF in estimation of all states.
- From Table 2, we can see that ultizing both lidar and radar measurements improves the tracking results.
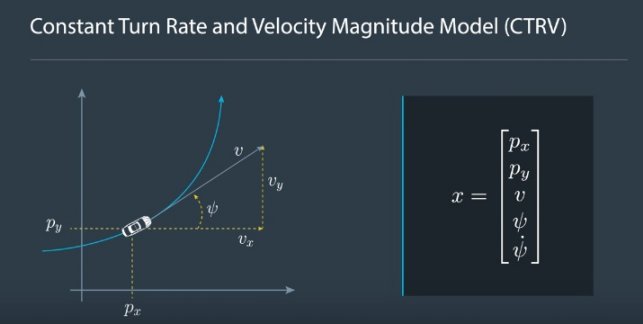
Motion Model: CTRV model
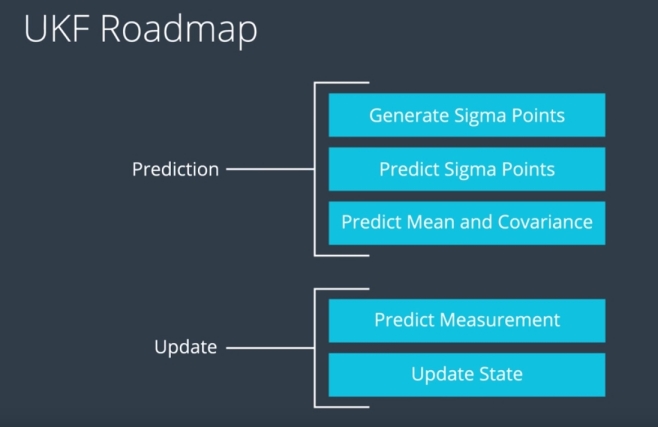
Unscented Kalman Filter roadmap
Code & Files
1. Dependencies & environment
- cmake >= 3.5
- All OSes: click here for installation instructions
- make >= 4.1
- Linux: make is installed by default on most Linux distros
- Mac: install Xcode command line tools to get make
- Windows: Click here for installation instructions
- gcc/g++ >= 5.4
- Linux: gcc / g++ is installed by default on most Linux distros
- Mac: same deal as make - [install Xcode command line tools]((https://developer.apple.com/xcode/features/)
- Windows: recommend using MinGW
- Eigen library
2. My project files
(Note: the hyperlinks only works if you are on the homepage of this GitHub reop, and if you are viewing it in “github.io” you can be redirected by clicking the View the Project on GitHub on the top)
-
CMakeLists.txt is the cmake file.
-
data folder contains test lidar and radar measurements.
-
Docs folder contains docments which describe the data.
-
src folder contains the source code.
3. Code Style
4. How to run the code
- Clone this repo.
- Make a build directory:
mkdir build && cd build - Compile:
cmake .. && make- On windows, you may need to run:
cmake .. -G "Unix Makefiles" && make
- On windows, you may need to run:
- Run it by the following commands:
./ExtendedKF ../data/obj_pose-laser-radar-synthetic-input.txt ./output.txt
5. Release History
- 0.1.1
- First proper release
- Update documentation
- Date 25 May 2017
- 0.1.0
- Initiate the repo
- Date 22 May 2017